2022.6 初版作成
トラ技の 2021.12 月号 pp.86-948(著者:渡辺智昭)に リモコンで操縦する船の 電子工作が載っていました。船の操縦というと、 「スクリューと舵」というイメージですが、その船は 外輪船で、2 個のモーターを正・逆回転させるしくみでした。
ライントレースカーやキャタピラーカーなど、 陸上を走るリモコンカーでは、ハンドルとモーターではなく、 左右二つのモーターを前後に動かす方法もよく見かけますが、 船でも同じことができるという発想が斬新だと思いました。 「そうか、こんな方法があったか」と 目からウロコが落ちる思いでした。
トラ技で提案された船の筐体はペットボトル 2 個を左右に配置し、 その上に板を載せるという構造でした。 「ペットボトルをうまく使うなあ」とこれも目からウロコでした。
ところで、amazon で植物に水をやるためのポンプが売っています。 これです。 これを船の推進力として使えるのではないか? と考え 作ってみました。
この水中ポンプは直流電圧をかけると回ります。5 V をかけると 1 A 弱の電流が流れます。5 W 程度です。左右両方のモーターを 駆動すると 10 W 程度消費することになります。5000 mAh のモバイル バッテリーのエネルギー量は 3.7 V * 5 Ah = 18.5 Wh ですから、 1 時間は連続走行できることになります。
当初、逆に電圧をかけると水が逆流するので、7291P ような モータドライバ IC を使えば良いと思っていたのですが、 そうではありませんでした。プラスマイナスの結線を逆にすると、 モーターは逆向きに回りますが、水流が弱くなるだけで、 向きは変わりません。 そこで、左右それぞれに前進用と後退用のモーターを 取り付け、計 4 個のモーターを使って船を走らせることに しました。
信号の送信は TWELITE を用いました。TWELITE はデジタル信号を 4 系統 送信できますので、今回の目的にピッタリです。
モバイルバッテリーは電子工作の電源として欠かせないものに なりました。この電子工作もモバイルバッテリーを使います。 ただし、モバイルバッテリーは、ニッケル水素電池とは 異なり、以下の問題があります。
1. のタイプの製品は電子工作には使えません。
2. の現象が起こると、 「過大電流が流れる」→「出力電圧を大幅に落とす」 →「電圧が減少したので電流が減る」→「出力電圧が元に戻る」 →「過大電流が流れる」 となり、発振のような状態になります。 今回の船の場合、この状態が発生すると、 一旦電源を off して、再度 on しても発振状態が続き、 元には戻りません。 モーターをいったん回路から切り離す必要がありました。
2. の状態を回避するには
左右独立に「前進・停止・後退」と操作するので、 このコントローラは、リモコン船のみならず、 リモコンカーの操縦にも使えます。
送信機を「子機」に設定しています。その理由は、 以下の通りです。開発当初、DCモータの始動電流による TWELITEの誤動作に悩まされました。 DC モータは始動時に大電流が流れるので、 モバイルバッテリーの保護回路が働いて、 出力電圧が落ち、TWELITE が誤動作します。
TWELITE が回復しても、スイッチ操作の送信は、 親機の場合「状態が変わったら 1 回だけ送信する」 というモードしかないので、もう一度スイッチ操作を やり直す必要があります。
子機は「0.03 秒ごとに送信を繰り返す」という連続送信モートを持っています。 このモードを使うため、送信機を子機に設定しました。 その後、誤動作を回避する方法を発見したので、送信機が 親機でも良いのですが、そのままにしてあります。
クリックで PDF が開きます。

外観
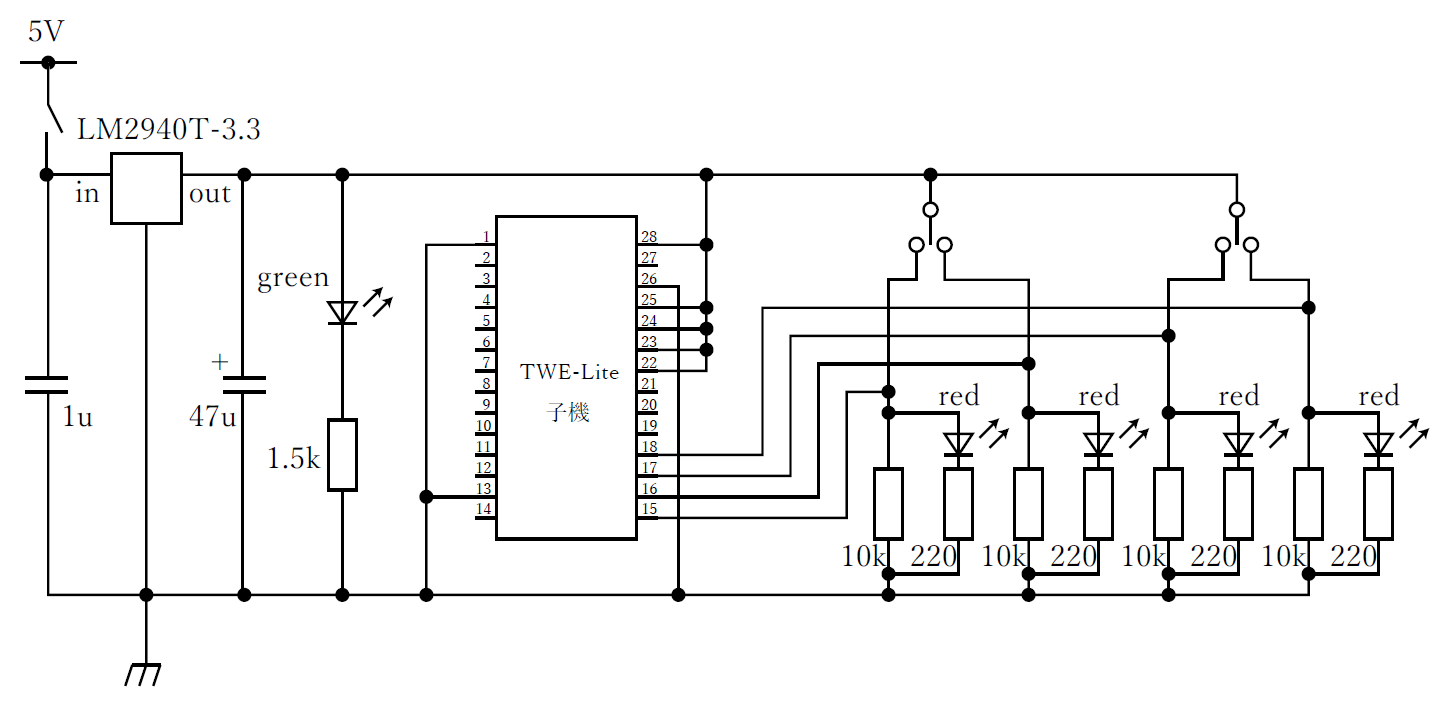
スイッチは (on)--off--(on) というタイプのもので、 接点を 1-2-3 とすると、 何もしないと開放、上に倒すと 2-3 が接続, 下に倒すと 1-2 が接続 という状態になります。 バネが付いており、手を離すと開放状態に戻ります。 4 つのスイッチの on/off の状態を 15-18 番端子(デジタル 入力1~4)に入力します。 off のとき 0 V, on のとき 3.3 V です。
スイッチの on/off を目視確認しなくても良い場合は LED と 220 Ωの抵抗は省略可能です。 ただし、確認用 LED があった方が分かりやすいです。
10 k の抵抗は省略可能な感じがしますが、 試してみるとダメでした。 スイッチが off のとき、TWELITE の入力用端子は 0 V にならず、 1.61 V となりました。ダイオードが off 状態のとき抵抗値が非常に 高くなり、入力端子がフローティング状態となってしまうようです。 さらに、TWELITE の入力用端子から電流が流れ出し、 LED がわずかに光りました。
10 k の抵抗を省略し、
Vcc ----- スイッチ ----- ダイオード --+-- 330 ohm ----- Gnd
という順番に接続し + 印の箇所を TWELITE に入力すると、 off のとき 0 V になりますが、on のとき LED の順方向電圧 のため、1.43 V となりました。順方向電圧が非常に低い LED があれば良いのですが、最も低い赤色でも 1.43 V あります。
ケースは 100 円ショップ(ダイソー)で 売っている弁当箱を使いました。
クリックで PDF が開きます。
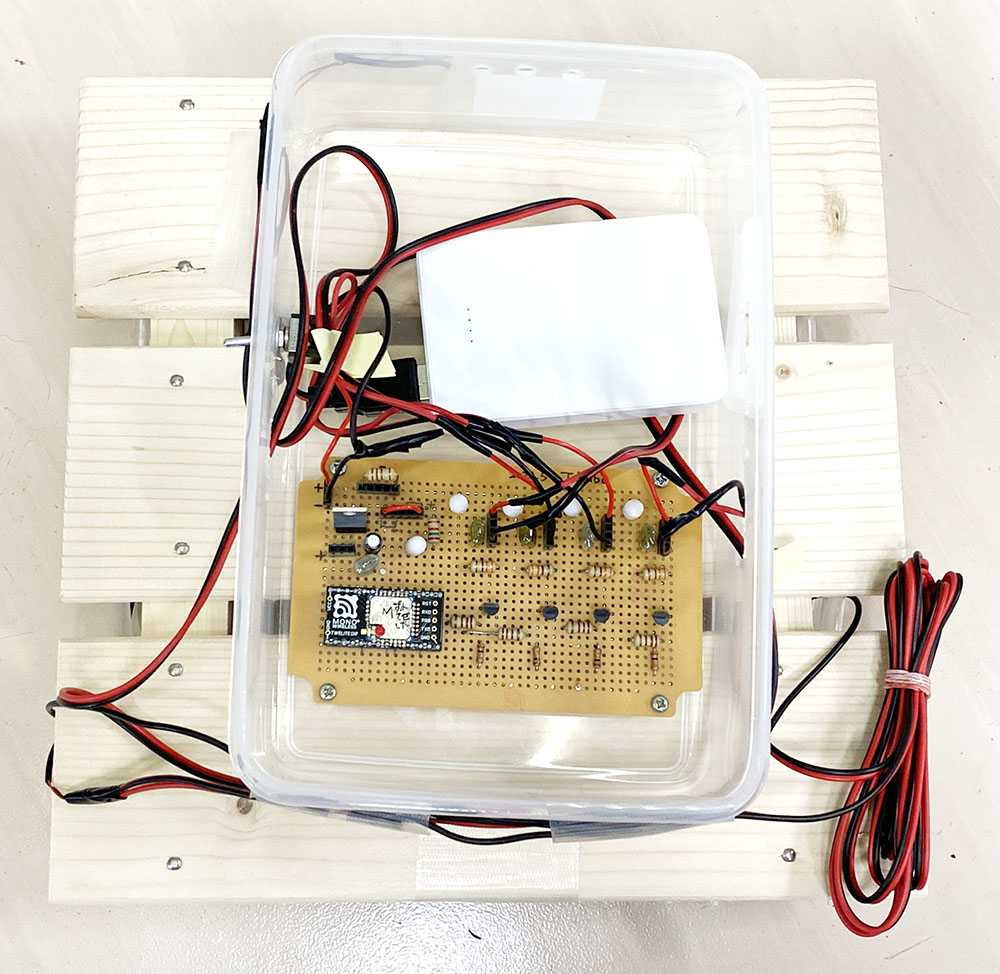
表面
裏面
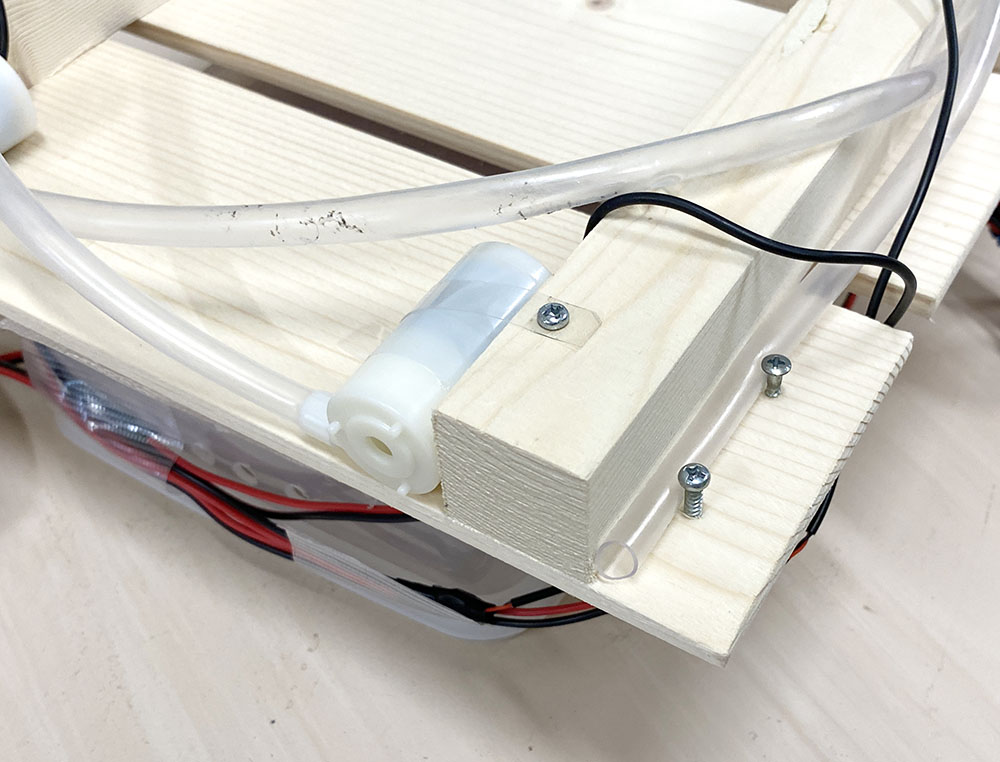
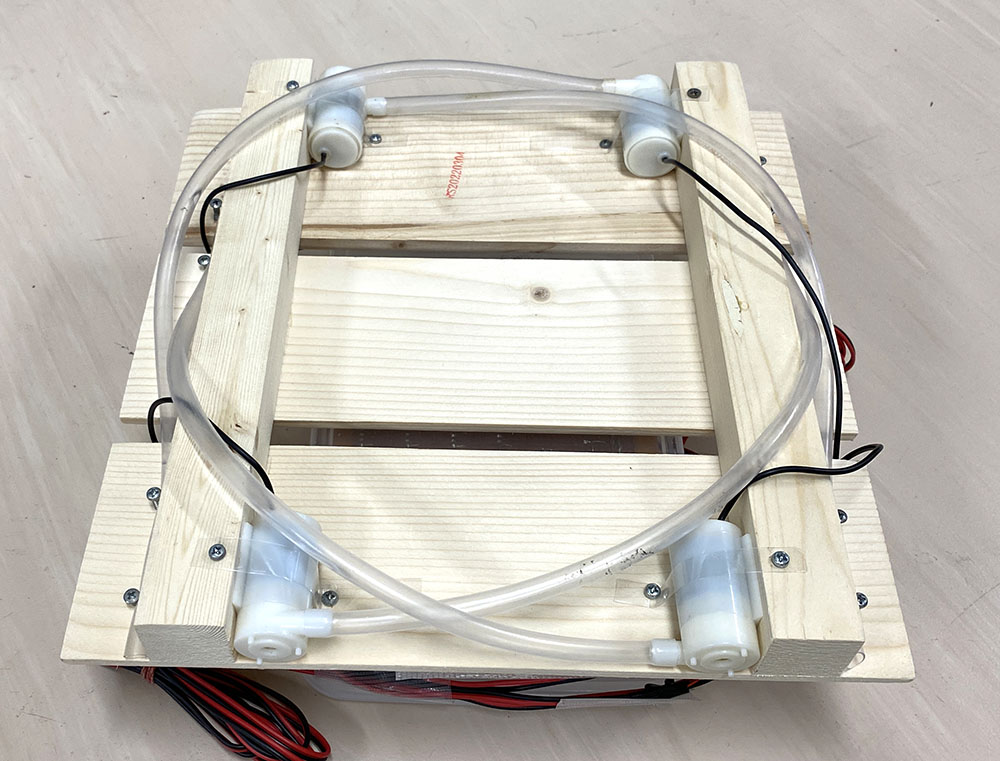
モーターとビニールパイプの固定
走っている様子
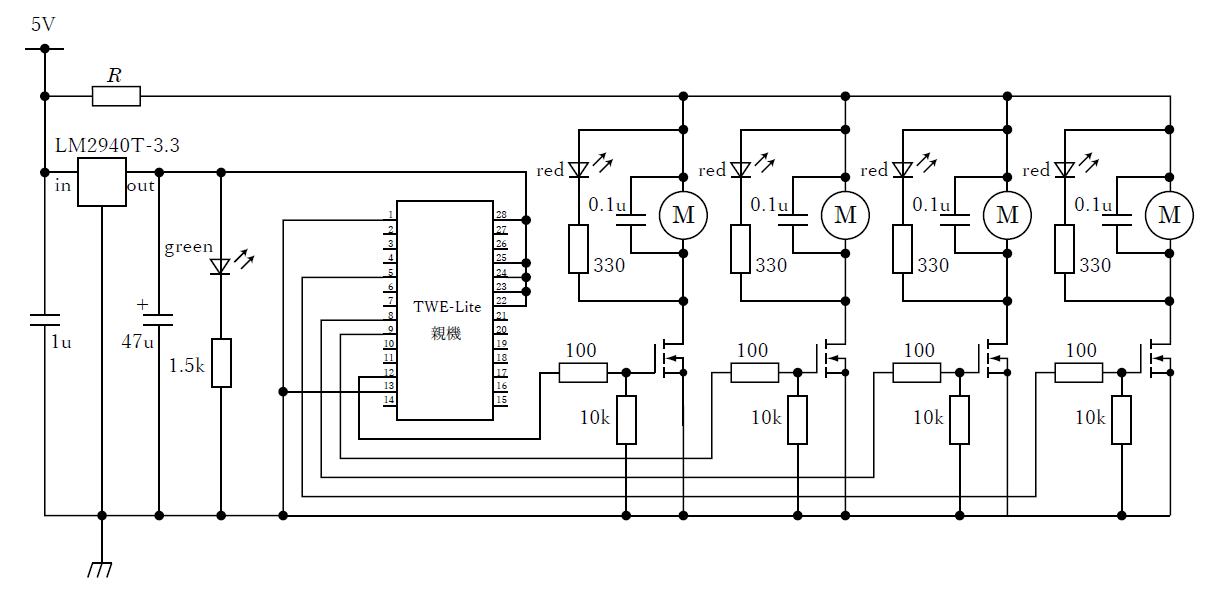
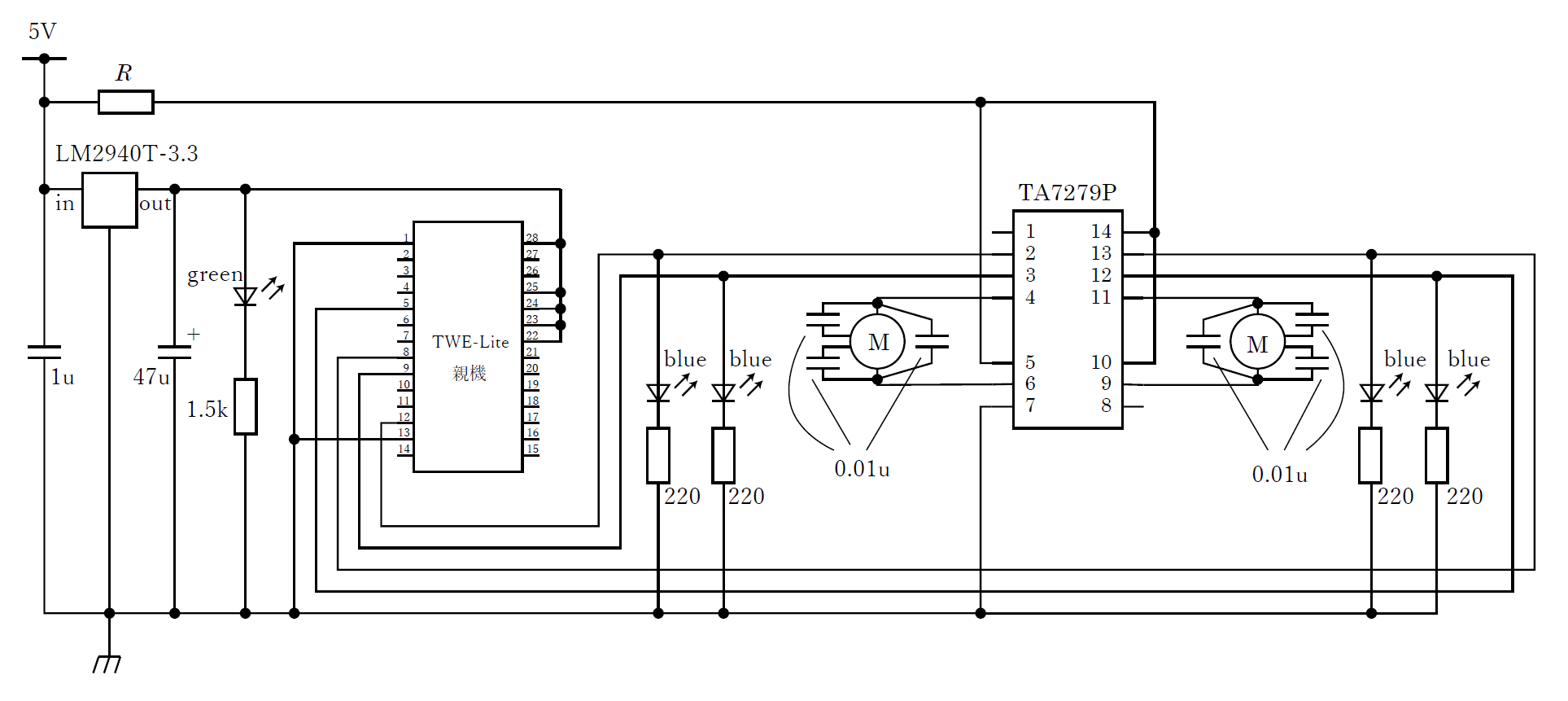
デジタル伝送された 4 bit に基づいて、モーターを on/off するだけの回路です。 送信側が子機なので、受信側は親機に設定します。
抵抗 R はモータ始動時に流れる大電流を抑制するために あります。 モバイルバッテリーの出力電流によって必要な R の値は異なります。 私が使った出力 1 A クラスのモバイルバッテリーの場合、 0.47 Ωでは小さすぎで誤動作を防げませんでした。 1.1 Ω なら大丈夫でした。その間は試していません。 ただし、 1.1 Ωの抵抗は非常に熱くなります。 出力 2 A クラスのものは抵抗なしでも大丈夫でした。 後述するようにモータ一個の消費電流は定格で 1 A に近いので、 モバイルバッテリーは出力が 2 A 以上のものが望ましいです。
R の部分はピンソケットにしておいて、 適切な値の抵抗を接続できるようにして下さい。ショートさせる 場合は、ブレッドボード用ワイヤーを用いてください。
モータに並列に入れるコンデンサはノイズ除去用です。 大は小を兼ねるので 0.1 uF を使いました。 回路図にも 0.1 uF と書いていますが、 DC ブラシ付きモータのノイズ除去用としては、 0.01 uF が適正値だそうなので、0.01 uF でもよいと思われます。
モータのノイズ除去用コンデンサはモータの端子に直付けするのが 良いのですが、モータが水中にあるので、基板上に付けました。
TWELITE の端子から流せる電流は、最大 4 mA です。 モーターは 1 A 近い電流が流れます。 少なくとも 250 倍の増幅率が必要です。 トランジスタはコレクタ電流が増えると、増幅率が落ちるので、 2SC2655 などでは増幅率が不足すると思われます。
試作品第 1 号ではダーリントントランジスタである サンケンの 2SD2081 を使いました。 しかし、ダーリントントランジスタは、 飽和しても C-E 間電圧は 0 には ならず、0.8 V(B-E 間電圧 1 個分)程度になります。 また、動作チェックに使った AC アダプタは、 1 A を流すと 5 V が維持できず 4.5 V 程度に低下しました。 水中ポンプは 5 V をかけると 0.9 A 程度の電流が流れますが、 4.5 V - 0.8 V = 3.7 V 程度の電圧のとき、電流は 0.68 A 程度でした。 モバイルバッテリーでも同様であると思われます。
できるだけモータの出力を上げたいので、MOSFET を用いることに しました。手持ちの 2SK975 を用いましたが、2SK975 は生産完了品です。 N ch の MOSFET で 1 A 流せるものなら、何でもよいです。
船はホームセンターで売っている「すのこ」を使いました。 電子回路はタッパの中に入れました。 モータの固定は、ペットボトルを切り取ったものを 木ねじでとめました(このアイデアは谷口特任教授から いただきました)。 水を流すビニールパイプは木ねじで固定しました。
タミヤの楽しい工作シリーズの
を組み合わせると、リモコンカーになります。 試してませんが、同じくタミヤの 壁づたいメカ工作セット(ねずみ)の ボディを流用してもよさそうです。リモコンカーの場合は 2 つのモータを前後に駆動するので、 モータドライバ IC を使います。
リモコン船の場合、動作確認用 LED を 駆動する電流は電源から取っていたので、 電流量を気にする必要はありませんでした。
これに対して、リモコンカーは LED を駆動する電流は TWELITE から取る必要があります。 TWELITE の端子から取り出せる電流は最大 4 mA です。
4 mA 以下に押さえるために、 秋月の青色発光ダイオードに 220 Ω の 抵抗を接続しました。電流は 2.9 mA です。 秋月の緑色ダイオードに 1.5 kΩ の抵抗なら電流は 0.66 mA なので、 電源用 LED を緑色以外にして動作確認用 LED を緑色にしても よいです。
クリックで PDF が開きます。
三輪車
モータドライバ IC として、過去に購入して余っていた TA7279P (2回路入り) を使いました。 7279P のデータシートによると、Vcc は 6 V 以上と書いてあるので、 5 V は保証範囲外です。 個体によっては動かないかも知れません。
7279P は生産完了品なので、 代替品を秋月のサイトで探してみると、NJM2670 が使えそうです。 TB6643KQ は Vcc は 10 V 以上と書いてあるので、ダメだと思われます。
抵抗 R の値は、船の電子工作と同じで、 モバイルバッテリーが 1 A クラスのとき 1.1 Ω、 2 A クラスのとき不要でした。
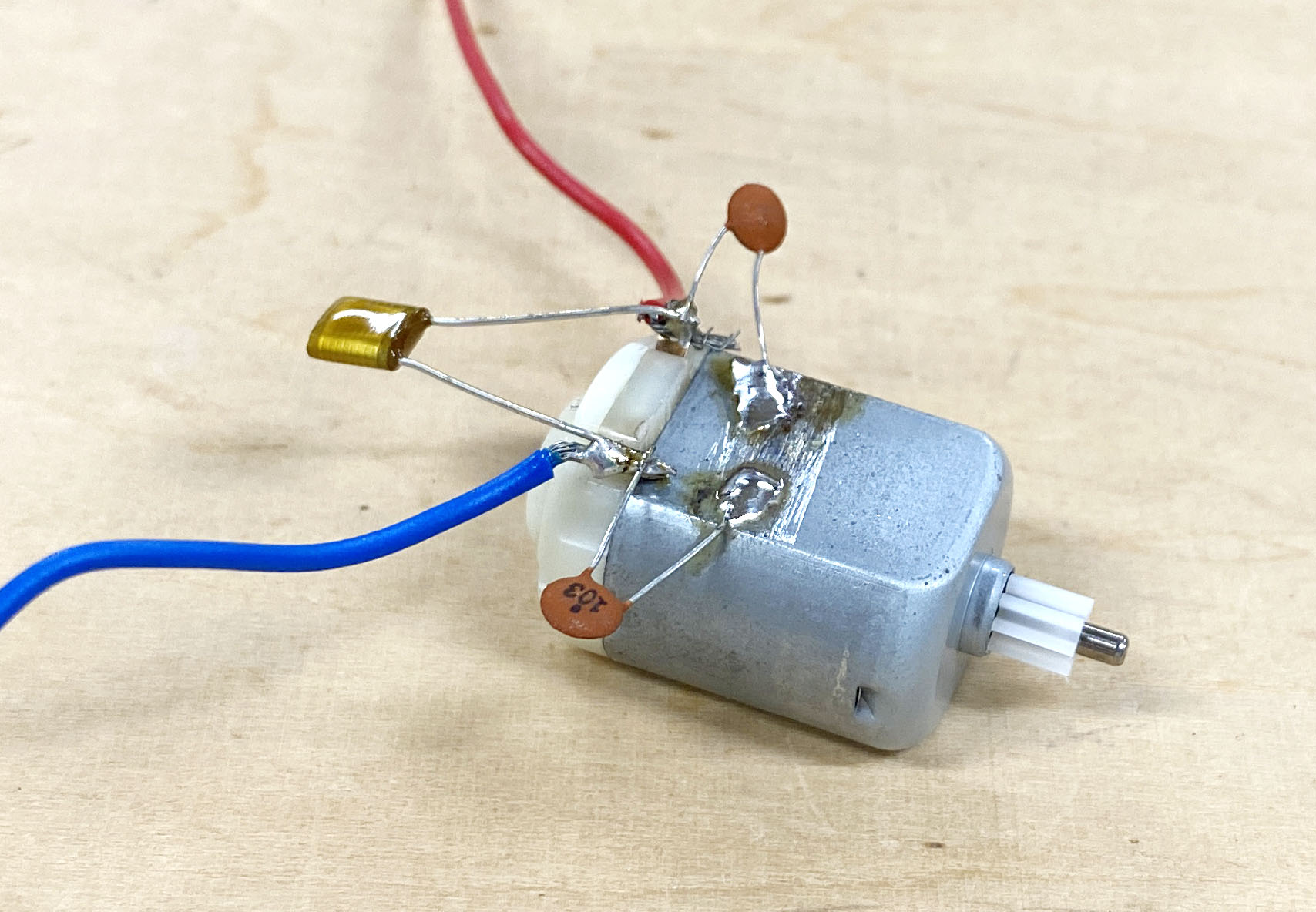
モータに接続するコンデンサ
直流モータはブラシと整流子が離れる瞬間にスパイク状のノイズを 出します。 モータの周辺のコンデンサはノイズ除去用です。 写真のように 3 個のコンデンサを使いました。 1 個は端子間を接続し、2 個は「端子」と「モータ本体」を 接続します。 モータ本体へのハンダ付けは難易度が高いです。 コツは以下の通りです。
写真では端子間がフィルムコンデンサ、端子と本体の間が セラミックコンデンサになっていますが、使い分けているわけでは ありません。手持ちの部品を使っただけです。 今回の用途の場合、フィルムコンデンサとセラミックコンデンサの間に 優劣はないので、どちらでもよいです。
最初、端子間にコンデンサを入れました。 入れる前は、スパイク状のノイズの電圧は 80 V などの 大きな値だったのに対して、端子間にコンデンサを入れると、 ±5 V 程度に軽減されました。
スパイク状のノイズを減らすために さらに各端子と本体間にコンデンサを接続すると、 スパイク状のノイズが「常時発生」→「希に発生」 となり、劇的な効果がありました。
結果として、端子間は「0.01 uF」と「0.01 uF が 2 個直列接続」 が並列に入っています。 最初にハンダ付けした端子間の 0.01 uF は除去し、 モータ筐体と端子間を 0.022 uF (合成容量が 0.01 uF 程度 となるようにした) にしてもよさそうに見えます。

クリックで PDF が開きます。
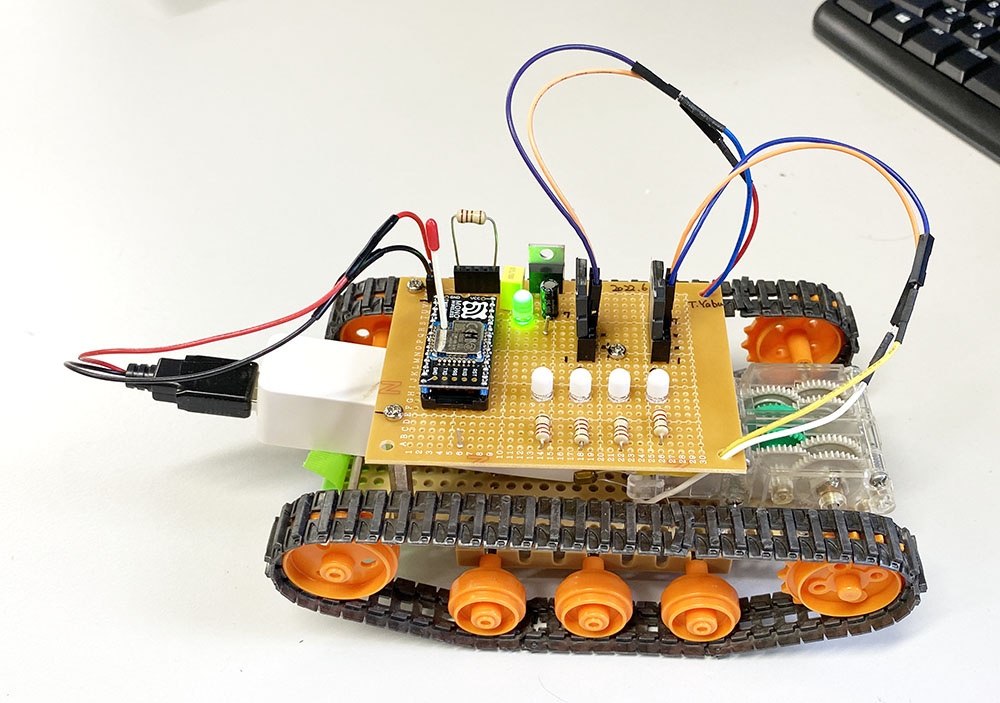
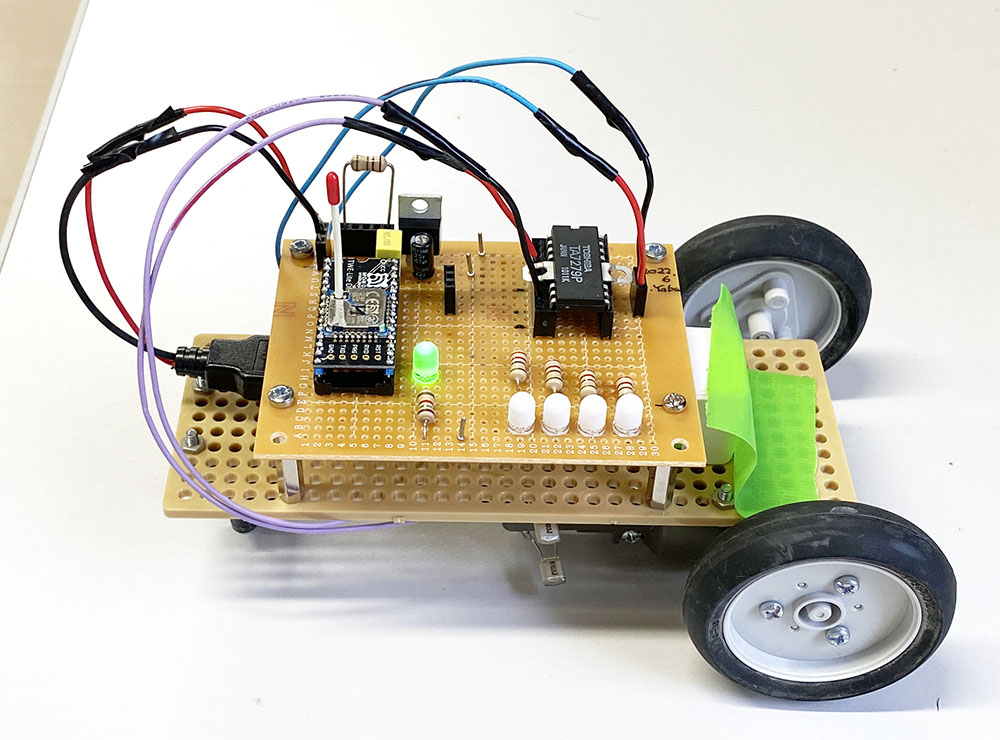
外観
モータドライバ IC として 7267 も余っていたので、7267 を 使ってみました。こちらはキャタピラーカーです。 三輪車用の回路と機能は同じなので、この回路を 三輪車に使っても良いですし、三輪車用の回路を キャタピラーカーに使ってもよいです。